BT-Master Code:
#include “Keypad.h” //Additional Arduino Library
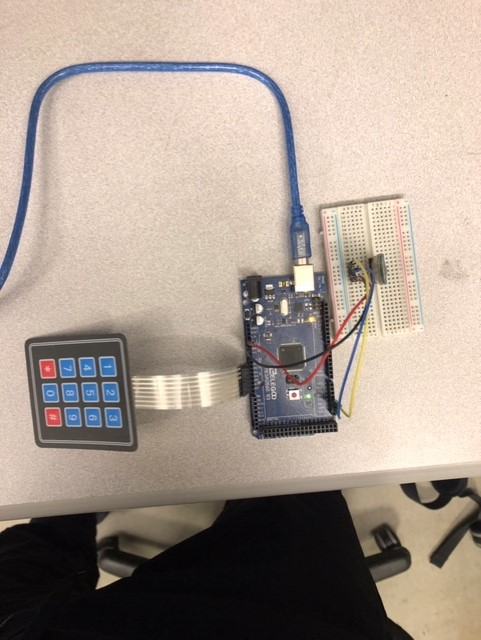
const byte Rows= 4; // Number of rows on the keypad = 4
const byte Cols= 3; // Number of columns on the keypad = 3
// Defining the cols and rows of the keypad
char keymap[Rows][Cols]=
{
{‘#’, ‘0’, ‘*’},
{‘9’, ‘8’, ‘7’},
{‘6’, ‘5’, ‘4’},
{‘3’, ‘2’, ‘1’}
};
byte rPins[Rows]= {A6,A5,A4,A3}; // Rows 0 to 3
byte cPins[Cols]= {A2,A1,A0}; //Columns 0 to 2
// Command for library for keypad
// Initializes an instance of the Keypad class
Keypad kpd= Keypad(makeKeymap(keymap), rPins, cPins, Rows, Cols);
void setup()
{
Serial.begin(9600); // Initializing serial monitor.
Serial1.begin(9600); // Initializing BT communication.
Serial.println(“BTserial started at 9600”);
Serial.println(“”);
}
// If key is pressed, this key is stored in ‘keypressed’ variable
// If key is not equal to ‘NO_KEY’, then this key sent via bluetooth
void loop()
{
char keypressed = kpd.getKey();
if (keypressed != NO_KEY)
{
Serial1.write(keypressed);
}
}