int gyro_address = 0x68; //MPU-6050 I2C address
int acc_calibration_value = 1000; //Enter the accelerometer calibration value
//Various settings
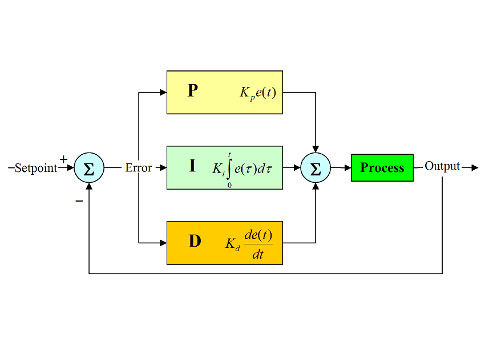
float pid_p_gain = 40; //Gain setting for the P-controller
float pid_i_gain = 1; //Gain setting for the I-controller
float pid_d_gain = 40; //Gain setting for the D-controller
float turning_speed = 30;
float max_target_speed = 150;
////////////////////////////////////////////////////////////////////////
//Declaring global variables
////////////////////////////////////////////////////////////////////////
byte start, received_byte, low_bat;
int left_motor, throttle_left_motor, throttle_counter_left_motor, throttle_left_motor_memory;
int right_motor, throttle_right_motor, throttle_counter_right_motor, throttle_right_motor_memory;
int battery_voltage;
int receive_counter;
int gyro_pitch_data_raw, gyro_yaw_data_raw, accelerometer_data_raw;
long gyro_yaw_calibration_value, gyro_pitch_calibration_value;
unsigned long loop_timer;
float angle_gyro, angle_acc, angle, self_balance_pid_setpoint;
float pid_error_temp, pid_i_mem, pid_setpoint, gyro_input, pid_output, pid_last_d_error;
float pid_output_left, pid_output_right; |