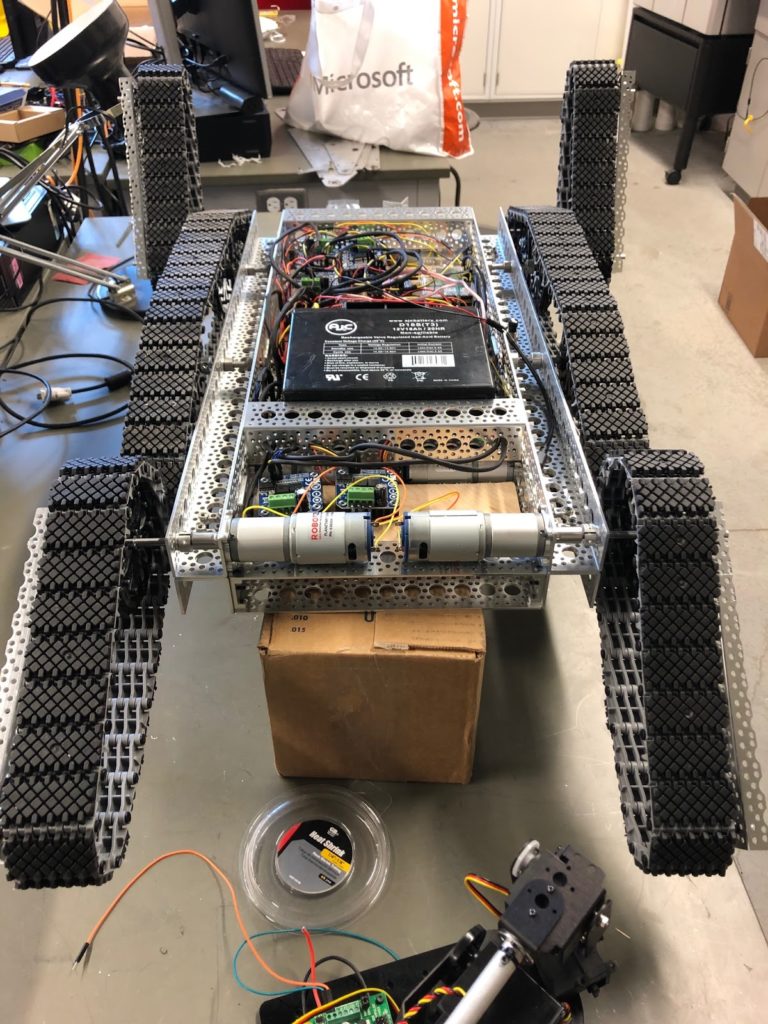
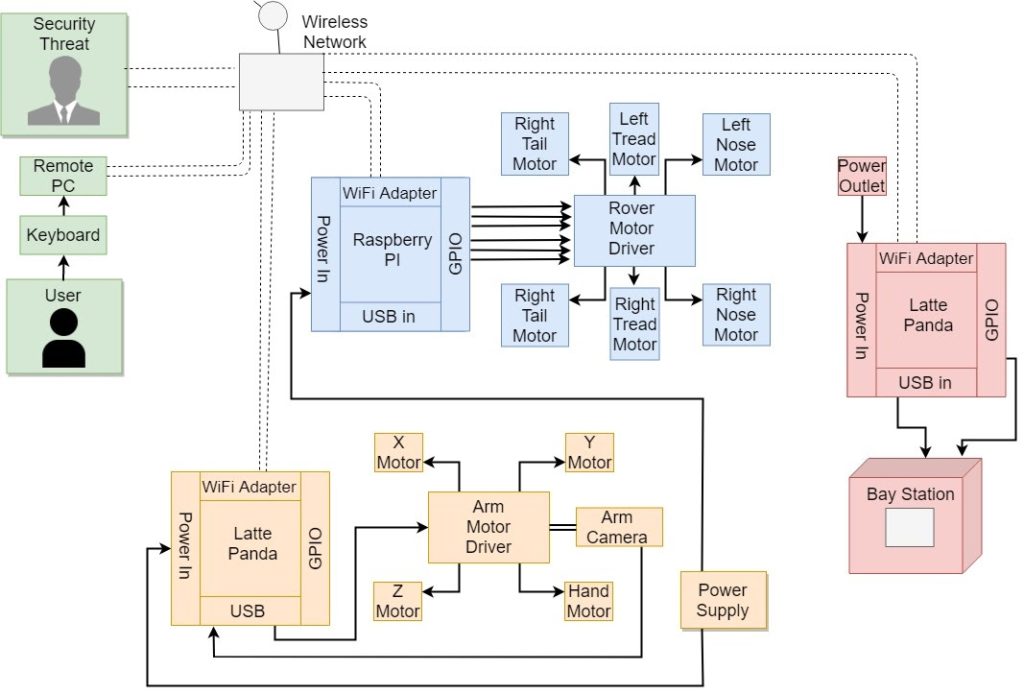
A total of six independently controlled motors. The control software on-board the Raspberry Pi serves to translate operator commands into PWM signals that determine speed and direction of each motor
- 4 – 16RPM 12Volt Arm Motors
- 2 – 60RPM 12Volt Drivetrain Motors